

-
工业机器人视觉传感器?
工业机器视觉系统是一种非接触式的光学传感系统,同时集成软硬件,综合现代计算机、光学、电子技术,能够自动地从所采集到的图像中获取信息或者产生控制动作。1、利用光源照射被测物体,通过光学成像系统采集视频图像,相机和图像采集卡将光学图像转换为数字图···19 2021-06 -
工业机器人之机械臂常州莱柯工业机器人自动化?
工业机器人为关节型机器人,关节型机器人的机械臂是由关节连在一起的许多机械连杆的集合体。本质上是一个拟人手臂的空间开链式机构,-端固定在基座上,另-端可自由运动。关节通常是移动关节和旋转关节,移动关节允许连杆作直线移动,旋转关节仅允许连杆之间发···19 2021-06 -
装了“眼睛”的工业机器人有哪些优势?
工业机器人是一种特定的机械机构,具有通用性,可完成多种工作任务可灵活改变动作程序,并且有不同程度的智能,又具有独立性,在工作中可以不依赖于人的干预!常州市莱柯工业机器人自动化有限公司的工业机器人是系统集成性产品,本体配合不同的末端执行器可实···17 2021-06 -
常州莱柯工业机器人自动化有限公司祝天下友人端午安康!
五月五,端午到,又是佳节好光景,荡起浆,破开浪,龙舟水中启航向;粽子香,祝福响,常州莱柯工业机器人自动化有限公司全体员工祝您快乐无忧体健康。祝天下所有朋友端午安康、生活甜蜜、幸福!常州莱柯工业机器人自动化有限公司以工业机器人为核心,以人工智···12 2021-06 -
工业机器人的工作原理?
工业机器人是系统集成性的产品,广泛应用在制造业上,汽车制造、电器、食品等行业,能替代反复机械式操纵工作,靠本身动力和控制能实现多种自动化生产线。能承受人类指挥,能够按照事先编排的程序运转,它的工作原理是示教再现;示教也称导引示教,既是人工导···10 2021-06 -
机械臂与工业机器人?
工业机器人是一种自动化设备,是自动执行工作的机器装置,靠自身动力和控制能力来实现各种功能的一种机器;可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人可以根据人工智能技术制定的原则纲领行动,将更多地协助或取代人类的工作,特别是一···08 2021-06 -
工业机器人控制系统与感知系统?
工业机器人是系统集成性产品,本体配合不同的末端执行器可实现多种自动化生产线,常州莱柯工业机器人自动化有限公司以提供客户满意的整体解决方案及智能化系统高科技产品与高效快速的服务团队。为客户提供机器人自动化系统交钥匙工程,助力企业构建智能车间!···07 2021-06 -
工业机器人常规保养工作?
 一、工业机器人工作状况的确认,确认常规保养前机器人经过至少4个小时停机(保证换油正常、不被工业机器人本体温度影响);二、机器人系统备份:工业机器人在进行常规保养前确认完系统状态后,统一进行系统备份操作。系统备份,油卡制定;三、机器人本体型号确···31 2021-05
一、工业机器人工作状况的确认,确认常规保养前机器人经过至少4个小时停机(保证换油正常、不被工业机器人本体温度影响);二、机器人系统备份:工业机器人在进行常规保养前确认完系统状态后,统一进行系统备份操作。系统备份,油卡制定;三、机器人本体型号确···31 2021-05 -
多关节工业机器人常州莱柯工业?
 多关节工业机器人的手臂与人一体上肢类似,其前三个关节是回转副(即RRR),多关节工业机器人一般由立柱和大小臂组成,立柱与大臂形成肩关节,大臂和小臂间形成肘关节,可使大臂做回转运动和俯仰摆动,小臂做仰俯摆动;结构紧凑,灵活性大,占地面积小,本体配···28 2021-05
多关节工业机器人的手臂与人一体上肢类似,其前三个关节是回转副(即RRR),多关节工业机器人一般由立柱和大小臂组成,立柱与大臂形成肩关节,大臂和小臂间形成肘关节,可使大臂做回转运动和俯仰摆动,小臂做仰俯摆动;结构紧凑,灵活性大,占地面积小,本体配···28 2021-05 -
码垛机器人自动化生产线多少钱常州莱柯工业?
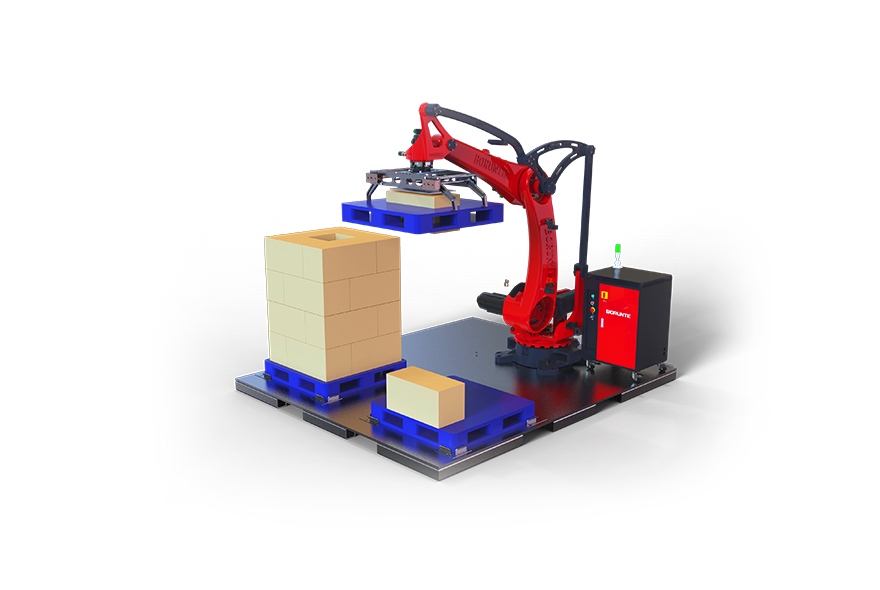 工业机器人是系统集成性产品,工业机器人本体配合不同的末端执行器可实现码垛机器人自动化生产线,冲压机器人自动化生产线、车床上下料机器人自动化生产线、注塑机器人自动化生产线、打磨机器人自动化生产线等多种动化生产线,常州市莱柯工业机器人自动化有限···27 2021-05
工业机器人是系统集成性产品,工业机器人本体配合不同的末端执行器可实现码垛机器人自动化生产线,冲压机器人自动化生产线、车床上下料机器人自动化生产线、注塑机器人自动化生产线、打磨机器人自动化生产线等多种动化生产线,常州市莱柯工业机器人自动化有限···27 2021-05
常州莱柯工业机器人自动化
专注冲压、码垛、机床上下料、注塑行业、设计制造全自动无人车间
专注冲压、码垛、机床上下料全自动无人车间
全国统一服务热线
13812179207